Uniform Data and Point Cloud Data
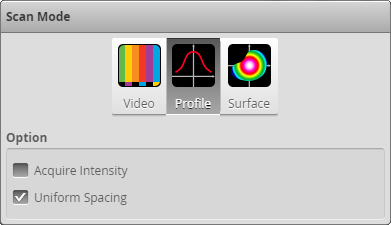
The data that a sensor produces in Profile mode is available in two formats: as uniform (resampled) data and as point cloud data (previously called "raw"). The sensor produces uniform data when Uniform Spacing is enabled and produces point cloud data when Uniform Spacing is disabled. The setting is available in the Scan Mode panel, on the Scan page.
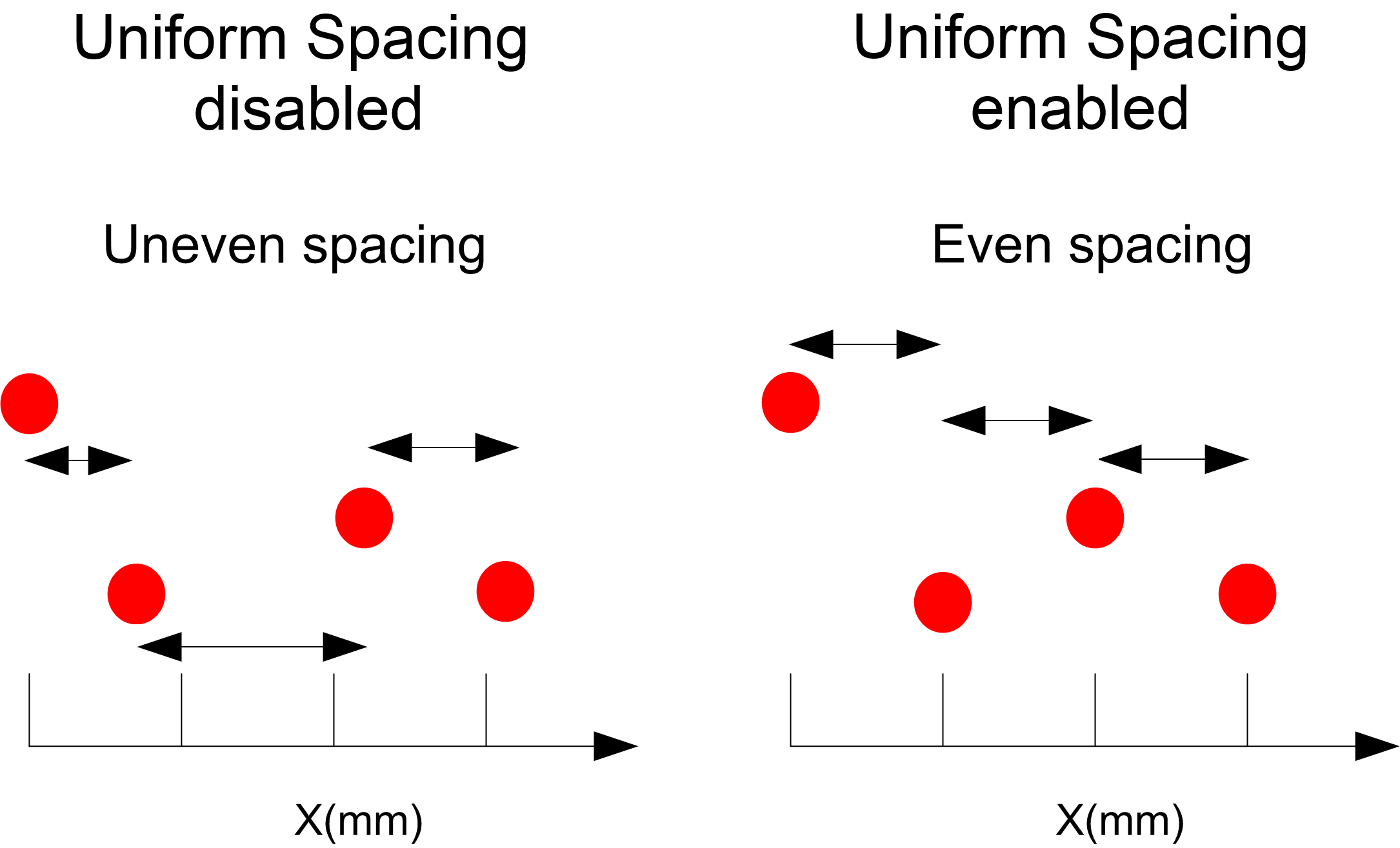
When Uniform Spacing is enabled, the ranges that make up a profile are resampled so that the spacing is uniform along the laser line (X axis). The resampling divides the X axis into fixed size "bins." Profile points that fall into the same bin are combined into a single range value (Z).
The size of the spacing interval is set under the Spacing tab in the Sensor panel on Scan page.
Resampling to uniform spacing reduces the complexity for downstream algorithms to process the profile data from the sensor, but places a higher processing load on the sensor's CPU.
When uniform spacing is not enabled, no processing is required on the sensor. This frees up processing resources in the sensor, but usually requires more complicated processing on the client side. Ranges in this case are reported in (X, Z) coordinate pairs.
A drawback of uniform spacing is that if sensors are angled to scan the sides of a target, data on the "verticals" is lost because points falling in the same "bin" are combined. When Uniform Spacing is disabled, however, all points are preserved on the sides. In this case, the data can be processed by the subset of tools that work on profiles without uniform spacing. Alternatively, the data can be processed externally using the SDK.

|
When uniform spacing is enabled, in the Ethernet output, only the range values (Z) are reported. The X positions can be reconstructed through the array index at the receiving end (the client). |
For information on enabling uniform spacing, see Scan Modes.