Sphere
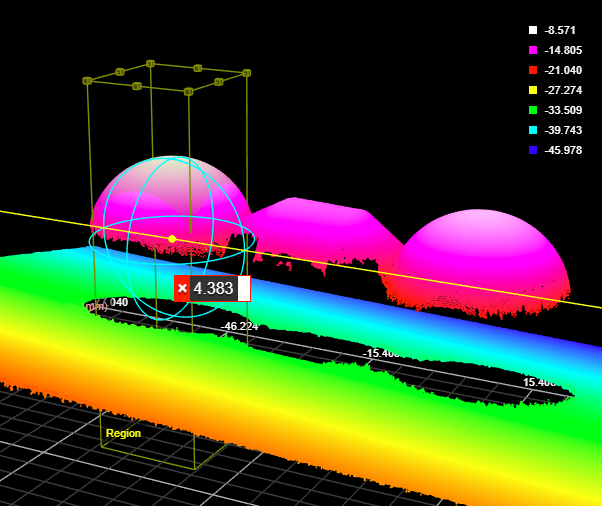
The Sphere tool lets you compute characteristics of a scanned sphere by specifying a region to inspect. For example, you can use the tool to align a robot-mounted sensor to a ball-bar as shown in the images below.

|
For the tool to work properly, the tool's region typically must be enabled and set, and properly placed. For more information, see the table of parameters below. |
|
2D View |
3D View |

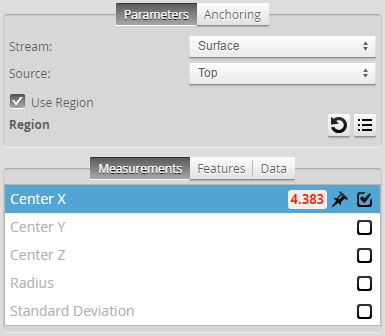
Measurement Panel
For information on adding, managing, and removing tools and measurements, as well as detailed descriptions of settings common to most tools, see Tools Panel.
Measurements, Features, Data, and Settings
| Measurement | Illustration |
|---|---|
|
Center X Determines the X position of the center of the sphere. |
|
|
Center Y Determines the Y position of the center of the sphere. |
|
|
Center Z Determines the Z position of the center of the sphere. |
|
|
Radius Determines the radius of the sphere. |
|
|
Standard Deviation Determines the error of the points compared to the computed sphere. It is defined as the square root of the variance of the distance of every point to the computed sphere. |
|


| Type | Description |
|---|---|
| Center |
The center of the circle encompassing the widest part of the fitted sphere. |
| Circle |
The circle encompassing the widest part of the fitted sphere. |
|
|
For more information on geometric features, see Geometric Features. |
| Type | Description |
|---|---|
|
Difference Surface |
Shows the fit error at each point in the height map.
|

| Parameter | Description |
|---|---|
|
Source |
The sensor |
|
Region |
The region to which the tool's measurements will apply. For more information, see Regions. In order for the tool to correctly fit a sphere to the scan data, you must set the region so that it only contains data from the sphere on the target.
|
|
Filters |
The filters that are applied to measurement values before they are output. For more information, see Filters. |
|
Decision |
The Max and Min settings define the range that determines whether the measurement tool sends a pass or fail decision to the output. For more information, see Decisions. |
