Gocator Acceleration
For information on the ports acceleration uses (for example, in order to ensure ports are not blocked over your network), see Required Ports.
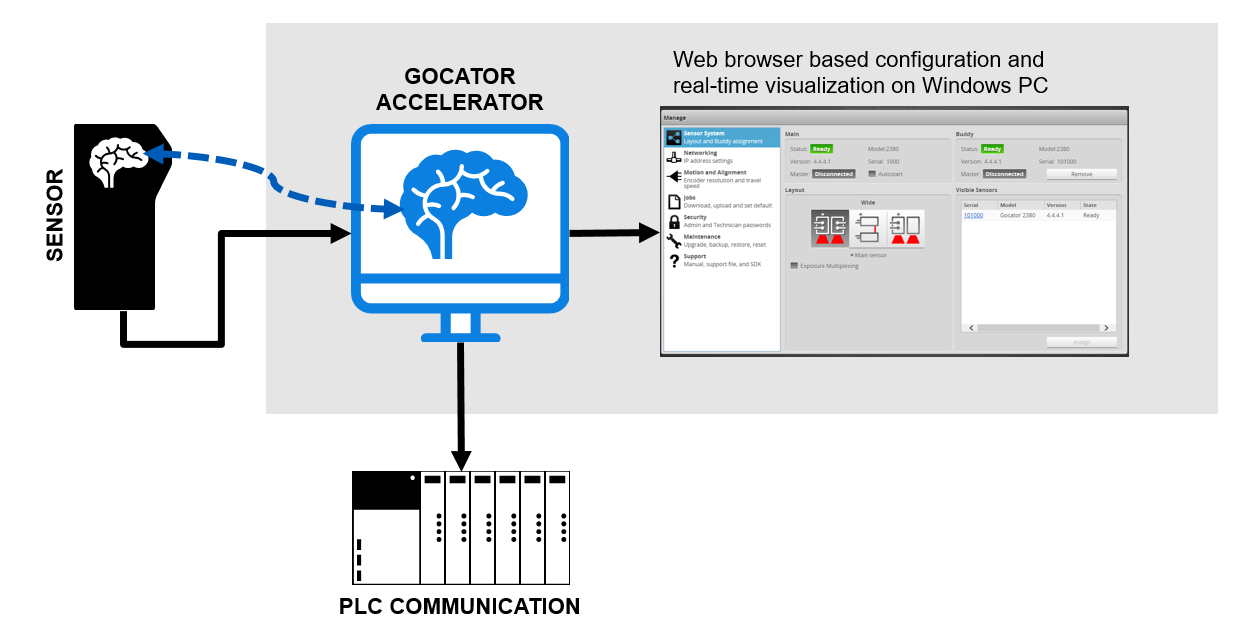
Acceleration improves a sensor system's processing capability by transferring the processing to a dedicated processing device in the system. The accelerator can accelerate one or more standalone sensors or multi-sensor systems.
- A hardware Smart Vision Accelerator called GoMax
- PC-based acceleration software (available either as a standalone utility or via the SDK)
For estimated performance and scan rates, see Estimated Performance.

|
|
The web interface of an accelerated sensor is identical to the interface of an unaccelerated sensor.
|
|
Accelerators support digital, analog, and serial output from sensors. However, because output must be passed to the accelerator and then back to the sensor, network latency will have an impact on performance. |
When a sensor is accelerated, it sends data directly to the accelerating device. You access the web interface using the IP address of the accelerating device, rather than the IP of the sensor. SDK applications can interface to the accelerator in the same way as is possible with a physical sensor, although the IP of the accelerating device must be used for the connection.
Benefits
Accelerated sensors provide several benefits.
Acceleration is completely transparent: because the output protocols of an accelerated sensor are identical to those of an unaccelerated sensor, SDK and PLC applications require no changes whatsoever for controlling accelerated sensors and receiving health information and data.
Measurement latency is reduced on accelerated sensors, which results in shorter cycle times. This means a sensor can scan more targets in a given time period.
The memory of accelerated sensors is limited only by the memory of the accelerating device.
Dashboard and Health Indicators
After a sensor is accelerated, the values of some health indicators come from the accelerating PC instead of the sensor. Others come from a combination of the accelerated sensor and the accelerating PC.
- For information on which indicators are affected in the Dashboard in the web interface, see State and Health Information.
-
Hardware Acceleration: GoMax
The GoMax Smart Vision Accelerator is a dedicated, small form factor device that can accelerate one or more sensors. Using GoMax to accelerate a sensor system rather than a PC greatly simplifies implementation and maintenance, providing a plug-and-play experience. And GoMax better handles continuous 3D data streams over Ethernet. Finally, GoMax automatically recovers from temporary power losses or system disconnects.
For more information on GoMax, see the product's user manual.
Software-Based Acceleration
|
|
The firmware version of the sensor you want to accelerate must match the version of the SDK used to build an accelerator-based application (or the version of the GoAccelerator utility). |
System Requirements and Recommendations
Minimum System Requirements
The following are the minimum system requirements for accelerating a single sensor with the accelerator PC application:
PC
- Processor: Intel Core i3 or equivalent (
- RAM: 4 GB
- Hard drive:
- Operating system: Windows 7 or higher (
|
|
Acceleration on Linux PCs is not supported. |
To accelerate more sensors or to run the system at higher speeds, use a computer with greater system resources.
Graphics Card
The acceleration of line profile sensors does not currently make use of a computer's graphics card.
Recommendations
The following are general recommendations:
- Purchase a PC based on the hardware specifications described in Estimated Performance.
- Run only the accelerator application on the PC: third-party applications can consume system resources in unpredictable ways and at random times.
- Limit background Windows processes such as drive optimization (defragmentation) or virus scans, or schedule them so that they don't interfere with scanning sessions.
- Ensure that sufficient overhead in the system's resources is available. You can review the PC's resources with the Windows Task Manager and Resource Monitor applications. We recommend that you leave at least 20% network bandwidth, CPU, memory and disk utilization at all times.
- To verify system stability and robustness, perform long-term testing over multiple days.
Installation
To get the necessary packages, go to https://downloads.lmi3d.com/, choose your product from the Product Downloads section, and download it from the Download Center.
Gocator Accelerator Utility
The Accelerator utility accelerates the standalone sensors or multi-sensor systems you choose.
|
|
When you use the Accelerator utility and specify an IP address for the accelerated sensor, EtherNet/IP is restricted to that IP address. This lets you accelerate multiple sensors and assign them to different IP addresses, while still allowing EtherNet/IP communications. |
To accelerate a sensor using the Accelerator utility:
| 1. | Power up the sensor system you want to accelerate. |
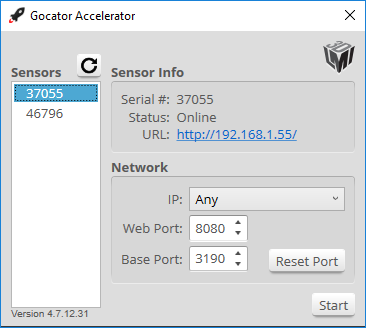
| 2. | Launch the Accelerator utility. |
| 3. | If a Windows Security alert asks whether you want to allow GoAccelerator.exe to communicate on networks, make sure Public and Private are checked, and then click Allow Access. |
| 4. | In the Sensors list, click the sensor you want to accelerate. |
If you do not see the sensor, you may need to wait a few seconds and then click the Refresh button ( ).
).
In multi-sensor systems, only the Main sensor is listed.
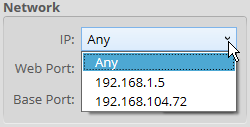
| 5. | (Optional) In the IP drop-down, choose an IP or choose Any to let the application choose. |
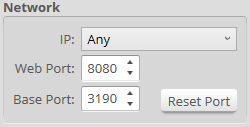
| 6. | (Optional) Set Web Port to a port for use with the accelerated sensor's URL. |
|
|
If port 8080 is already in use, set Web Port to an unused port. |
| 7. | (Optional) If you are accelerating multiple systems, click on another sensor in the Sensors list, and repeat the steps above. |
The application uses Base Port as an offset for several communication port numbers.
To avoid port conflicts, you should increment the base port number by at least 10 for each accelerated sensor.
Port 3190 is the default base port number, allowing connections from SDK-based applications and the web UI without manually specifying ports.
| 8. | Click Start. |
The sensor system is now accelerated. An icon appears next to the accelerated sensor in the Sensors list to indicate this.
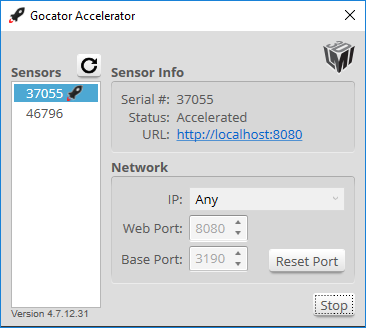
| 9. | To open the accelerated sensor's web interface, in the Accelerator application, click the link next to URL. |
When a sensor is accelerated, a "rocket" icon appears in the metrics area.

|
|
If you restart an accelerated sensor, the sensor will continue to be accelerated when it restarts. |
To stop an accelerated sensor in the Accelerator application:
| 1. | Select the sensor in the Sensors list. |
| 2. | Click Stop. |
To exit the Accelerator application:
| 1. |
 ) in the notification tray. ) in the notification tray. |
Clicking the X icon in the application only minimizes the application.
| 2. | Choose Exit. |
SDK Application Integration
Sensor acceleration can be fully integrated into an SDK application. Users simply need to instantiate the GoAccelerator object and connect it to a sensor object.
GoAccelerator accelerator = kNULL;
// obtain GoSensor object by sensor IP address
if ((status = GoSystem_FindSensorByIpAddress(system, &ipAddress, &sensor)) != kOK)
{
printf("Error: GoSystem_FindSensorByIpAddress:%d\n", status);
return;
}
// construct accelerator
if ((status = GoAccelerator_Construct(&accelerator, kNULL)) != kOK)
{
printf("Error: GoAccelerator_Construct:%d\n", status);
return;
}
// start accelerator
if ((status = GoAccelerator_Start(accelerator)) != kOK)
{
printf("Error: GoAccelerator_Start:%d\n", status);
return;
}
printf ("GoAccelerator_Start completed\n");
if ((status = GoAccelerator_Attach(accelerator, sensor)) != kOK)
{
printf("Error: GoAccelerator_Attach:%d\n", status);
return;
}
// create connection to GoSensor object
if ((status = GoSensor_Connect(sensor)) != kOK)
{
printf("Error: GoSensor_Connect:%d\n", status);
return;
}
After, the SDK application can control an accelerated sensor in the same way as an unaccelerated sensor.
Estimated Performance
The following table lists the running time of various measurement tools, with and without GoMax, as well as the performance increase factor when running with GoMax.
Note that although sensor models and job file configurations will affect running times, the performance increase factor for tools should be consistent across models and configurations.
| Measurement Tool | Running Time on Sensor (ms) |
Running Time with GoMax (ms) | Performance Increase Factor |
|---|---|---|---|
|
Surface Hole |
40 |
11 |
3.5 |
|
Surface Bounding Box |
30 |
9 |
3.3 |
|
Surface Plane |
2.3 |
0.4 |
6.0 |
|
Profile Dimension |
0.054 |
0.037 |
1.5 |
|
Profile Intersect |
0.075 |
0.028 |
2.7 |